
在科技日新月異的今天,自駕車已不再是科幻小說中的幻想,而是逐漸成為現實生活的一部分。這些自動行駛的汽車究竟是如何運作的?它們又如何在複雜多變的路況中做出正確判斷?讓我們一探究竟。
自駕車的核心技術
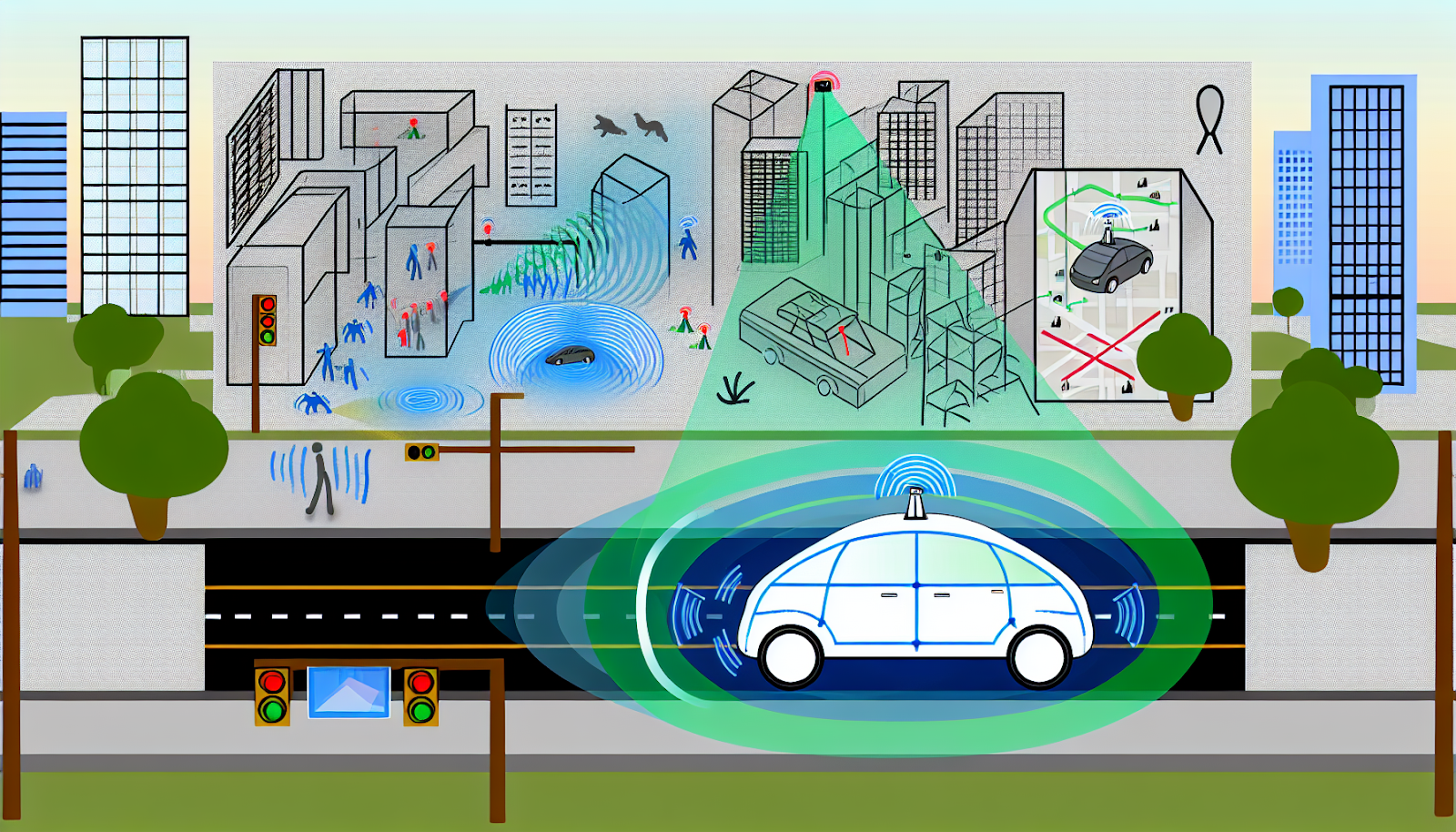
自駕車的運行依賴於多種先進技術的結合,其中最重要的包括感測器、人工智慧(AI)、機器學習以及高精度地圖。
1. 感測器的角色
自駕車上裝載了多種感測器,包括雷達、光達(LiDAR)、攝影機和超聲波感測器。這些設備能夠即時收集周圍環境的信息,類似於人類的眼睛和耳朵。例如,光達可以發射數以萬計的激光脈衝,並通過反射回來的光波構建三維環境模型。
2. 人工智慧與機器學習
收集到的數據需要經過處理和分析,這就是人工智慧和機器學習發揮作用的地方。AI 系統能夠識別物體、預測行人和其他車輛的行動,並根據這些信息做出駕駛決策。機器學習則通過大量的數據訓練,使系統能夠不斷學習和優化自身能力。
3. 高精度地圖
自駕車還依賴於高精度地圖,這些地圖比傳統 GPS 地圖更為詳細,包含有道路標誌、車道線、交通燈等信息。這些地圖與即時數據結合,幫助自駕車準確定位並規劃行駛路徑。

自駕車如何判斷路況
自駕車在行駛過程中,需要不斷地監控和判斷路況,以確保安全和效率。以下是其主要的判斷和決策過程:
1. 感知環境
首先,自駕車利用感測器收集周圍環境的信息,包括行人、其他車輛、障礙物及交通信號等。這些信息被傳送到中央處理單元進行分析。
2. 理解場景
隨著數據的累積,AI 系統會對當前場景進行分析。例如,它能夠識別紅綠燈狀態、行人穿越馬路的意圖,以及前方車輛的速度和方向。
3. 預測與計劃
在理解場景後,自駕車需要預測可能發生的情況,例如行人是否會突然走出來,或是前方車輛是否會變道。根據這些預測,系統會計劃最佳行駛路徑,並調整速度和方向以避免潛在危險。
4. 執行決策
最後,自駕車根據計劃好的路徑和策略進行操作,控制油門、剎車和方向盤,以安全有效地達到目的地。
自駕車面臨的挑戰
儘管自駕車技術日益成熟,但在實際應用中仍面臨諸多挑戰:
1. 複雜環境中的可靠性
在惡劣天氣或複雜城市環境中,自駕車需要更加精確的判斷力。目前,一些極端情況仍難以完全解決,如大霧或暴雨導致感測器失效。

2. 道德與法律問題
自駕車必須在道德上做出選擇,例如在緊急情況下如何優先考慮乘客或行人的安全。此外,各國法律對自駕車的規範也不盡相同,影響其普及速度。
3. 網絡安全
自駕車需要連接網絡以獲取最新地圖和交通信息,但這也帶來了網絡安全問題,防止黑客攻擊成為必須解決的一大課題。
未來展望
隨著技術的不斷進步,自駕車正逐漸改變我們的出行方式。未來,自駕車有望大幅提升交通效率,降低事故率,並為不便開車的人群提供便利。然而,要實現全面普及,我們仍需克服技術、法律及社會層面的諸多挑戰。隨著時間推移,自駕車將不僅僅是科技的奇蹟,更將成為我們日常生活的一部分。